
Зміст
- 1. Поняття про кінематику машинно-тракторних агрегатів. Основні елементи кінематики руху машинно-тракторних агрегатів. Центр агрегату, центр і радіус повороту агрегату. Кінематичні параметри агрегату. Визначення мінімально допустимого радіуса повороту агрегату
- 2. Кінематичні характеристики робочої ділянки
- 3. Види поворотів агрегату та їх класифікація. Визначення довжини робочих і холостих ходів агрегату. Коефіцієнт робочих ходів. Шляхи зменшення холостих ходів агрегату
- 4. Обґрунтування оптимальних розмірів загінок та ширини поворотної смуги
- 5. Способи руху машинно-тракторних агрегатів, їх класифікація та характеристика
- 6. Фактори, що визначають вибір способу руху агрегату
- 7. Підготовка поля до роботи агрегатів
- 8. Використання інтернет-ресурсів на прикладі точного землеробства
- Питання для самоконтролю
1. Поняття про кінематику машинно-тракторних агрегатів. Основні елементи кінематики руху машинно-тракторних агрегатів. Центр агрегату, центр і радіус повороту агрегату. Кінематичні параметри агрегату. Визначення мінімально допустимого радіуса повороту агрегату
Особливість виконання більшості виробничих процесів у сільському господарстві – переміщення машинно-тракторних агрегатів на полях. При цьому агрегати проходять значні відстані.
Кожна машина чи агрегат та їх робочі органи рухаються за різними траєкторіями, які відрізняються один від одного.
«Кінематика» – це рух матеріальних тіл без урахування сил, що зумовлюють цей рух.
Кінематика агрегату – це траєкторія руху агрегату під час виконання технологічної операції з точки зору геометричних форм.
Для раціонального використання техніки потрібно знати її кінематику.
Для МТА характерний складний рух. Щоб спростити вивчення закономірностей руху агрегатів, умовно цей рух характеризують траєкторією однією точки, названої умовно кінематичним центром агрегату \((Ц_{а})\).

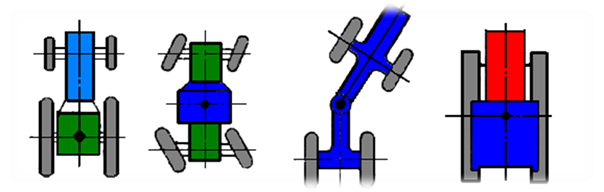
а – колісний трактор з однією ведучою віссю; б – трактор схеми 4х4 та всіма керованими колесами; в – трактор зі шарнірним остовом; г – гусеничний трактор
Умовно прийняті розміщення \(Ц_{а}\) для основних типів тракторів, наведено на рис. 1.8.1. Так, в агрегаті з колісними тракторами з однією ведучою віссю за \(Ц_{а}\) прийнято проекцію на площину руху точки середини ведучої осі, а в тракторів схеми 4х4 та всіма керованими колесами – проекцію на площину руху точки середини прямої, яка з’єднує середини ведучих осей. В агрегаті з колісними тракторами, які обладнані шарнірним остовом, за \(Ц_{а}\) прийнято проекцію на площину руху центра шарніра, а у гусеничних тракторів та самохідних машин – проекцію на площину руху точки перехрещення повздовжньої осі трактора з вертикальною площиною, яка проведена через середини опорних ланок гусениці.
До інших кінематичних характеристик агрегату, що впливають на його рух у загінці, відносять:
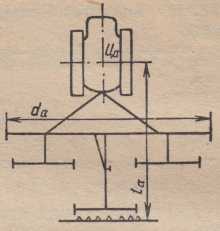
- кінематичну довжину агрегату \(l_{а}\) – відстань уздовж прямої між центром агрегату \(Ц_{а}\) і останнім рядом його робочих органів у положенні прямолінійного руху;
- кінематичну ширину агрегату \(d_{а}\) – відстань між крайніми точками за шириною (у формулах з визначення ширини поворотної смуги використовують значення половини кінематичної ширини агрегату \(0,5 d_{а}\), тому в літературі зустрічається таке формулювання кінематичної ширини агрегату: проекція відстані між поздовжньою віссю та крайніми точками за шириною агрегату \((d_{к})\): розрізняють \(d_{к}\) праворуч та ліворуч);
- довжина виїзду агрегату \(е\) – відстань від контрольної лінії до центра агрегату, на яку його виводять на поворотну смугу до початку повороту;
- повздовжня база \(L_{б}\) – відстань між мостами ведучих і ведених коліс, або між осями котків;
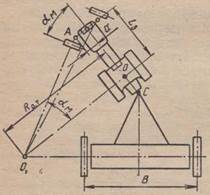
- центр повороту – умовна точка (точка \(O_{1}\), рис. 3) на місцевості, навколо якої відбувається поворот агрегату;
- мінімально допустимий радіус повороту \(R_{o}\).
Радіус повороту – відстань між центром агрегату і центром його повороту. Поворот агрегату вважають правильним, якщо всі його колеса котяться без бокових здвигів.
На холостому ходу вздовж великого радіуса збільшується холостий шлях. Тому під час поворотів і розворотів на поворотній смузі треба забезпечити рух агрегату за можливо меншого радіуса повороту \(R_{о.т.}\)
Найменший радіус повороту агрегату зумовлюють радіус повороту трактора, конструктивні і поворотні особливості машини, зчіпки, габарити машини, швидкість руху, рельєф поля, стан агрофону та кваліфікація механізатора.
Найменший радіус повороту \((R_{о.т.})\) агрегату визначають за формулою, м:
$$ R_{о.т} = L_{б} \cdot ctg{\alpha_{м}} + a, $$
де \(L_{б}\) – база трактора;
\(\alpha_{м}\) – кут повороту;
\(a\) – половина відстані між осями поворотних цапф, м.
Мінімально допустимий радіус повороту агрегату визначають двома способами: дослідним і графічними.
Приблизні значення радіуса повороту агрегату залежно від ширини захвату (і поправок на швидкість руху) подано в додатку.
Маневрові властивості агрегатів
Маневрові властивості машинних агрегатів характеризують повороткість, стійкість та керованість руху, прохідність.
Повороткість – це властивість агрегату переходити з прямолінійного на криволінійний рух та навпаки.
Стійкість руху (поздовжня та поперечна) – це властивість зберігати сталий напрямок руху.
Керованість руху – це властивість агрегату переходити зі сталого напрямку руху в інший, який задається дією керування.
Прохідність агрегату – це властивість агрегату без допоміжних засобів своїм ходом долати перешкоди, які можуть зустрічатися на шляху руху.
2. Кінематичні характеристики робочої ділянки
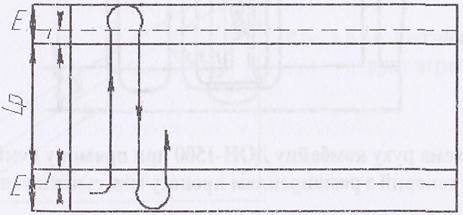
Земельна площа, на якій використовують агрегат, називають робочою ділянкою. Розміри ділянки кінематично характеризують її довжина L та ширина А. Робочу ділянку або її частину, призначені для виконання технологічної операції, називають загінками. Для обраного способу руху і конкретного агрегату кожна загінка має ширину С, довжину L_{р} робочої частини, а також ширину поворотної смуги Е.
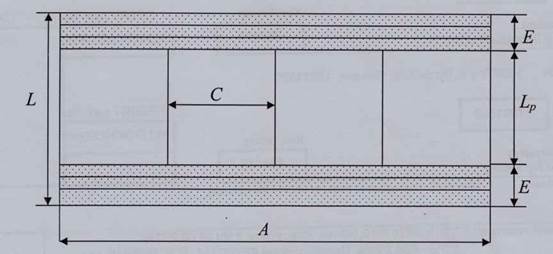
А – ширина поля; L – довжина поля; С – ширина загінки; Е – ширина поворотної смуги; Lр – довжина гонів
3. Види поворотів агрегату та їх класифікація. Визначення довжини робочих і холостих ходів агрегату. Коефіцієнт робочих ходів. Шляхи зменшення холостих ходів агрегату
Під час виконання технологічних операцій значну частину пройденого шляху становлять заїзди та повороти. У середньому, від загального шляху, який проходить агрегат, на холості заїзди припадає 8…12 %.
У зв’язку з цим для забезпечення найвищої ефективності використання агрегату необхідно холостий хід агрегату звести до мінімуму і цим забезпечити максимальну продуктивність агрегату.
Для цього необхідно правильно вибирати вид повороту. Головна умова вибору повороту агрегатів – поліпшення техніко-економічних показників і якості роботи агрегатів.
Повороти виконують на 900 і 1800.
Повороти класифікують на:
- безпетльові – за дугою кола без прямолінійного відрізка (дугоподібні);
- безпетльові з прямим виїздом;
- петльові-грушоподібні (відкрита петля);
- петльові-вісімкоподібні (закрита петля);
- повороти із заднім ходом агрегату з відкритою та закритою петлею > (для навісних агрегатів);
- голчасті – в разі реверсивного ходу агрегату.
Можливі й інші різновиди поворотів:
- із застосуванням бокової та подвійної петлі;
- кутові.
Види поворотів подано на рис. 1.8.5, 1.8.6.
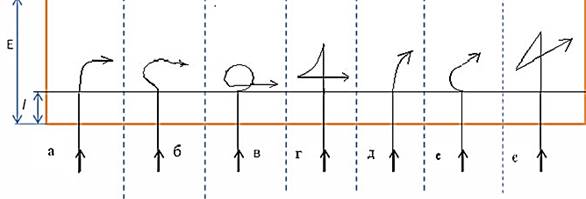
Е – ширина поворотної смуги, м; е – кінематична довжина виїзду агрегату, м;
а – безпетльовий по колу; б – петльовий з відкритою петлею; в – петльовий з закритою петлею; г – петльовий із застосуванням заднього ходу агрегату; д – безпетльовий кутовий; е – петльовий кутовий; ж – петльовий кутовий з застосуванням заднього ходу агрегату
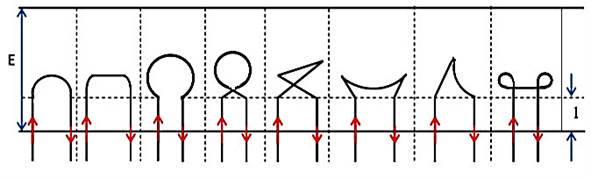
а – по колу; б – з прямолінійним виїздом; в – грушоподібний; г – вісімкоподібний; д – із застосуванням заднього ходу агрегату (закрита петля); ж – із застосуванням заднього ходу агрегату (відкрита петля); з – голчастоподібний; і – здвоєнопетльовий
Довжина холостого ходу на поворотах \((L_{x})\) залежить від складу та виду агрегату та його конструктивних параметрів.
Довжина холостого ходу під час виконання петльових поворотів:
$$ L_{x} = L_{п} + 2 \cdot e,\: м, $$
де \(L_{п}\) – довжина петлі повороту, м;
\(e\) – довжина виїзду агрегату, м;
$$ L_{п} = \gamma_{п} \cdot R_{п},\: м, $$
де \(\gamma_{п}\) – коефіцієнт, який враховує співвідношення петлі та радіус повороту (додатки);
\(R_{п}\) – радіус повороту.
Довжина холостого ходу під час виконання безпетльового повороту з прямолінійною ділянкою:
$$ L_{б} = L_{п} + 2 \cdot e + l_{х},\: м, $$
де \(l_{х}\) – довжина прямолінійної ділянки, м.
Довжину робочих ходів на загінці визначаємо за формулою:
$$ S_{p}=n_{p} \cdot L_{p} = \frac{C_{опт} \cdot L_{p}}{B_{p}},\: м. $$
Загальна довжина холостих ходів на загінці під час петльових поворотів:
$$ S_{хз}=\frac{2 \cdot C_{опт}}{B_{p}} \cdot \left( 3 \cdot R_{min} + l_{a} \right) ,\: м, $$
де \(C_{опт}\) – оптимальна ширина загінки, м;
\(B_{p}\) – робоча ширина захвату агрегату, м;
\(R_{min}\) – мінімальний радіус повороту агрегату, м;
\(l_{a}\) – кінематична довжина агрегату, м.
Загальна довжина холостих ходів на загінці під час безпетльових поворотів:
$$ S_{хз}=\frac{2 \cdot C_{опт}}{B_{p}} \cdot \left( 1,5 \cdot R_{min} + l_{a} \right) ,\: м. $$
Коефіцієнт робочих ходів, що показує ступінь використання на корисну роботу загального шляху агрегату в загінці, є важливою характеристикою вибраного способу руху, яка впливає на продуктивність агрегату і являє собою відношення сумарного робочого шляху агрегату на загінці до всього пройденого шляху:
$$ \varphi = \frac{S_{p}}{S_{p} + S_{х}} , $$
де \(S_{p}\) – загальна довжина робочого шляху агрегату на загінці, м;
\(S_{х}\) – загальна довжина холостого шляху агрегату на загінці, м.
Що більший коефіцієнт \(\varphi\), то менший холостий шлях агрегату і більша його продуктивність.
Значення коефіцієнта залежить від розмірів оброблювальної ділянки (довжини гону), кінематичних показників агрегату – радіуса повороту, довжини виїзду, ширини агрегату, способу і швидкості руху під час поворотів і заїздів.
Зі збільшенням швидкості час, який витрачають на поворот (за швидкостей 5…6 км/год) швидко, а потім все більш повільно скорочується. За швидкостей понад 9…10 км/год тривалість повороту зменшується незначно через збільшення шляху повороту. Тому виконувати повороти на швидкостях понад 10 км/год нераціонально. В усіх випадках, коли це можливо, слід використовувати безпетльові повороти, за яких в 2…2,5 рази скорочується шлях холостого ходу і ширина поворотної смуги порівняно з петльовими способами поворотів.
Застосування агрегатів з меншою довжиною виїзду дозволяє скоротити довжину холостих ходів. Тому, особливо за малої довжини гонів, слід надавати перевагу навісним агрегатам і шеренговому розташуванню машин у причіпних агрегатах.
Виконання цих умов дозволяє підвищити продуктивність агрегатів на 15…25 % через більш повне використання часу руху.
4 Обґрунтування оптимальних розмірів загінок та ширини поворотної смуги
Оптимальною шириною загінки є така, за якої для такого способу руху забезпечується мінімальна довжина холостих ходів або максимальний коефіцієнт робочих ходів на всій оброблюваній ділянці.
Оптимальну ширину загінки \(C_{опт}\) для петльових способів руху (загінних) визначають за формулою:
$$ C_{опт} = \sqrt{16 \cdot R^2 + K_c \cdot B_p \cdot L_p} ,\: м, $$
де \(K_{c}\) – коефіцієнт пропорційності, який залежить від способу руху (за петльових способів руху \(K_{c} = 2\), для безпетльових \(K_{c} = 3\)).
Для безпетльових способів руху :
$$ C_{опт} = \sqrt{K_c \cdot B_p \cdot L_p} ,\: м. $$
На практиці \(C_{опт}\) визначають змінною продуктивністю агрегату:
$$ C_{опт} = \frac{(2…3) \cdot W_{зм} \cdot 10^4}{L} ,\: м, $$
де 2…3 – кількість змін;
\(L\) – довжина гонів, м.
Це дає змогу уникати переїзду агрегату під час зміни з однієї загінки на іншу.
Остаточно вибрана ширина загінки має бути кратною подвійній ширині захвату агрегату, що виключає проїзди з неповним захватом і дає можливість закінчувати обробіток загінки на тому боці, де вона розпочиналась.
Обґрунтування ширини поворотної смуги
Поворотну смугу на полі відбивають, якщо розворот агрегату за межами загінки не можливий.
Визначення ширини поворотної смуги. Ширина поворотної смуги на загінці має бути обґрунтованою. Її розміри не можуть перевищувати мінімуму, що регламентують дві умови: можливість безперешкодного повороту агрегату і необхідність наступної обробки поворотної смуги цим же агрегатом.
Першу умову визначають конкретні кінематичні характеристики агрегату і його повороткість. Щоб під час холостих заїздів не було огріхів або підвищеного пошкодження рослин, під час обробки міжрядь треба ще до початку повороту вивести агрегат за межі оброблювальної ділянки на величину е – довжину виїзду агрегату, тобто відстань від контрольної лінії до центра агрегату, на яку його виводять на поворотну смугу до початку повороту.
У загальному випадку довжина виїзду залежить від типу агрегату, форми повороту, показників поворотності і кінематичної довжини агрегату.
Для начіпних агрегатів (із заднім начіплюванням) \(е = (0,3...0,6)l_{a}\), для агрегатів з фронтальним (чи боковим) розміщенням робочих органів довжина виїзду має негативне значення, тобто поворот починається відразу після проходу робочими органами контрольної лінії на деякій відстані за нею;
при цьому \(е = – (0,4...0,6) l_{a}\).
Для агрегатів з причіпними машинами \(е = (0,6...1,0) l_{a}\).
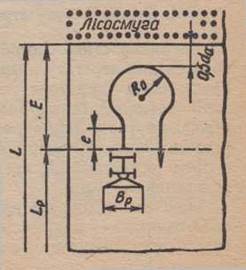
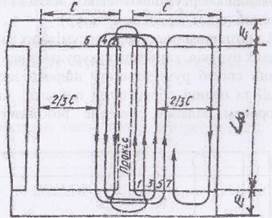
Другу складову ширини поворотної смуги визначає мінімально допустимий радіус повороту і показник поворотності агрегату. Враховуючи, що більшість полів захищені лісосмугами, третя складова ширини поворотної смуги береться не менше половини кінематичної ширини агрегату \(d_{a}\) (рис. 1.8.7).
Отже, ширину поворотної смуги визначають з урахуванням характеристик агрегату і швидкості його руху на повороті. На ширину поворотної смуги впливає і стан ґрунту. Із збільшенням швидкості і зменшенням міцності ґрунтового покриву погіршуються умови повороту, зростає його радіус, що вимагає збільшення поворотної смуги.
Заокруглено під час роботи на рівному полі ширину поворотної смуги \(E_{п}\) визначають за такими формулами:
для петльових поворотів:
$$ E_{п} = 2,8 \cdot R_{о} + 0,5 \cdot d_{a} + e,\: м, $$
або
$$ E_{п} = 3 \cdot R_{о} + l_{a},\: м, $$
для безпетльових поворотів:
$$ E_{п} = 1,14 \cdot R_{о} + 0,5 \cdot d_{a} + e,\: м, $$
або
$$ E_{п} = 1,5 \cdot R_{о} + l_{a},\: м $$
Враховуючи необхідність обробки поворотних смуг цим самим агрегатом (друга умова), їх ширину беруть кратною захвату агрегату:
$$ E_{опт} = K \cdot B_p , $$
де \(K\) – фактичне число проходів агрегату.
Результати округляють до цілого числа (парного чи непарного). Парність чи непарність числа проходів на поворотній смузі залежить від особливостей виконання операцій на поворотній смузі. У більшості випадків приймають парне число проходів.
5. Способи руху машинно-тракторних агрегатів, їх класифікація та характеристика
Технологічне поєднання циклічно повторюваних робочих і холостих ходів під час виконання агрегатами операції являє собою спосіб руху. Способи руху МТА розрізняють за такими ознаками: напрямом робочих ходів (вкругову, гоновий, діагональний); організацією території (загінний, беззагінний); напрямів поворотів (правоповоротний, лівоповоротний, комбінований); схемою обробітку робочої ділянки (однозагінний, двозагінний, багатозагінний); способом виконання поворотів (безпетльових, петльовий, із заднім ходом, реверсний тощо).
Найбільш поширена класифікація способів руху агрегатів за першою ознакою – напрямом робочих ходів, де виокремлюють три головні групи руху:
- гонові;
- діагональні;
- кругові (фігурні).
Гоновий спосіб характеризується тим, що агрегат під час виконання робочого ходу рухається прямолінійно вздовж загінки, а холості ходи виконує на поворотній смузі.
Різновидами гонового способу є такі способи руху агрегату:
- човниковий (сівба, культивація, коткування, оранка оборотними плугами);
- безпетльовий з перекриванням (міжрядний обробіток);
- комбінований з чергуванням загінок всклад і врозгін (оранка);
- перехресний (сівба зернових культур);
- гоновий з розширенням середини суміжних загінок (збирання зернових, цукрового буряку, картоплі, кукурудзи тощо).
Гонові способи руху забезпечують більш рівномірне завантаження агрегатів, зменшують шлях холостого ходу агрегатів.
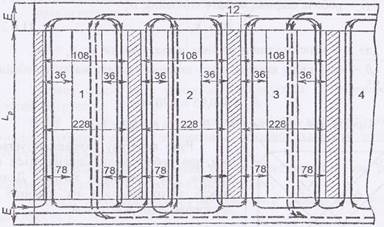
Е – поворотна смуга, м; Е = 21,6 м або відповідає Е = 48 рядків; С – ширина загінки, м; С = 228 рядків
Між загінками збирають 12 рядків.
Рух кругом характеризують тим, що робочі ходи здійснюють як уздовж, так і впоперек загінки. Такий спосіб застосовують на ділянках з довжиною гонів 400…600 м (рис. 1.8.11).
Прокіс між загінками \((B_{1})\):
$$ B_{1} = B_{к} + B_{р},\: м, $$
де \(B_{к}\) – конструктивна ширина захвату жатки, м;
\(B_{р}\) – робоча ширина захвату жатки, м.
На оранці звичайними плугами застосовують способи руху:
- оранка з чергуванням загінок всклад і врозгін;
- петльовий комбінований;
- безпетльовий комбінований;
- двозагінковий.
Діагональний спосіб руху характеризує переміщення агрегатів під кутом до сторін ділянки. Цей спосіб застосовують на боронуванні, культивації, дискуванні агрегату, а також за перехресної сівби зернових.
Кутовий спосіб руху агрегатів застосовують на передпосівній культивації ґрунту.
6. Фактори, що визначають вибір способу руху агрегату
Машинно-тракторний агрегат на полі рухається з певною послідовністю і закономірністю, які визначають спосіб його руху. Часто на одній і тій самій операції може бути застосовано кілька різних способів руху.
Із загального шляху, який проходить агрегат, у середньому 8…12 % (а на коротких ділянках до 40 %) припадає на холості заїзди на загінках, причому для конкретного поля довжина холостих заїздів залежить від правильного вибору способу руху. Будь-який зайвий кілометр, пройдений агрегатом вхолосту, – це непродуктивні затрати часу і палива. Скорочення холостого руху агрегату збільшує його робочий шлях за зміну, що сприяє зростанню продуктивності праці, зниженню витрат енергії.
Інколи вибір способу руху впливає на якість виконуваної операції. Наприклад, чергування оранки загінок, розміщених поряд, способом руху всклад-врозгін удвоє зменшує кількість гребенів і борозен, скорочує обсяг додаткової роботи на їх розрівнювання.
У багатьох випадках невдалий вибір способу руху і пов’язаних з ним поворотів агрегату на поворотній смузі призводить до нерівномірного спрацювання складаних одиниць керування поворотом і ходової частини.
Отже, правильний вибір раціональних способів руху агрегатів має велике значення для підвищення якісних і техніко-економічних показників їх роботи.
Вибір способу руху визначають три умови:
- досягнення максимальної продуктивності агрегату, яку характеризують значення коефіцієнта робочих ходів і використання часу зміни;
- якість виконуваних робіт, яку характеризують кількість утворених під час оранки всклад, а також у розгінних борозен, ступінь пошкодження рослин, повнота збирання врожаю, величина огріхів;
- зручність обслуговування агрегату, що характеризують кількість необхідних розміточних ліній, розміщення місць технологічних завантажень і довантажень, розміри поворотних смуг тощо.
Отже, ми бачимо, що вибір того чи іншого способу руху визначає, перш за все, якість виконання операції і залежить від виду і складу агрегату, розмірів ділянок і їх особливостей, зручності обслуговування, можливості скорочення допоміжних операцій тощо. Якщо для якої-небудь технологічної операції можна застосувати різні способи руху, то за однакової якості роботи та інших умов найкращий береться за найбільшим коефіцієнтом робочих ходів.
7. Підготовка поля до роботи агрегатів
Підготовка поля до роботи містить:
- Огляд поля з метою усунення перешкод, які погіршують якість виконання механізованих робіт та створюють несприятливі умови для використання агрегатів.
- Вибір способу руху агрегатів, з врахуванням якого визначають розміщення загінок.
- Розмічання поворотних смуг за допомогою вішок і нарізання контрольних борозен.
- Розбивання ділянки на загінки, прокошування на поворотних смугах або кутах загінок, проведення лінії першого проходу агрегату.
Під час підготовки полів слід також зважати на зручність під’їзних шляхів.
Загінки позначають вішками заввишки близько 2 м. Їх ставлять на такій відстані, щоб кожну наступну вішку було видно від попередньої.
Для роботи швидкісних агрегатів поле має бути добре вирівняне, з мінімальними борознами і гребенями.
Під час підготовки поля до роботи швидкісних агрегатів поворотні смуги мають бути збільшені, оскільки із збільшенням швидкості руху збільшується радіус повороту агрегату.
8. Використання інтернет-ресурсів на прикладі точного землеробства
Підготовці полів до механізованих робіт у передових господарствах приділяють багато уваги, враховуючи, що підготовка робочої ділянки – необхідна умова високопродуктивної роботи.
У деяких господарствах наперед накопичують основні паспортні дані про поля (розміри, конфігурація, середній похил і його напрям, питомий опір ґрунту), що спрощує призначення заходів з підготовки поля до роботи. На маршрутній карті роблять відповідні позначки, вказують строки робіт на окремих полях, а за потреби і розмічання полів на загінки.
Поля великих розмірів, але неправильної конфігурації, розбивають на менші ділянки прямокутної чи квадратної форми.
У цих господарствах підготовку полів до роботи агрегатів, як правило, виконують спеціальні працівники під керівництвом агронома бригади, бригадира або його помічника.
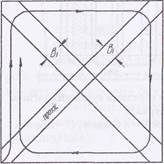
Розмічання полів виконують згідно із заготовленими наперед схемами розмітки полів (рис. 1.8.14).
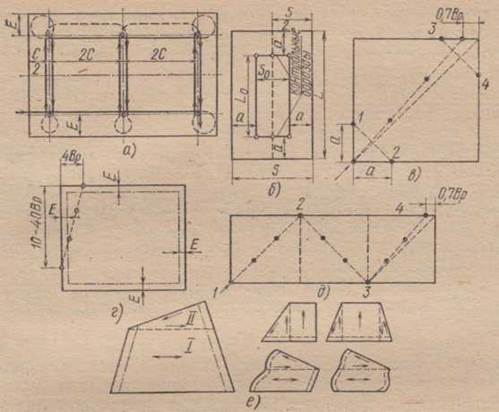
а – оранка з чергуванням загонів; б – для оранки беззагінно-круговим способом; в – для роботи агрегату на полі квадратної форми діагонально-перехресним способом; г – за діагонально-кутового способу руху; д – для роботи агрегату діагонально-перехресним способом на полі прямокутної форми із співвідношенням сторін 3 : 1 і більше; е – для оранки полів неправильної форми
На рис. 1.8.14 показано приклад розмічання поля неправильної форми. Поле розбивають на дві ділянки таким чином, щоб перша з них мала паралельні сторони вздовж напрямку оранки, а друга була трикутної форми. Ділянки з паралельними боковими сторонами обробляють як прямокутні ділянки. З боку непаралельних сторін цієї ділянки відбивають поворотні смуги. Ділянку трикутної форми обробляють у напрямку вказаних стрілок.
Можливі й інші форми полів, їх розмічання на ділянки і напрям оранки вказано стрілками на тому самому рисунку.
Під час розмічання полів неправильної форми ширину загінки відміряють за перпендикуляром до напряму оранки, а не межею поворотних смуг.
Питання для самоконтролю
- Дайте визначення, що розуміють під кінематикою агрегатів.
- Які основні елементи кінематики агрегатів?
- Дайте характеристику допоміжним елементам кінематики агрегату.
- Що розуміють під мінімально допустимим радіусом повороту, формула розрахунку?
- Дайте характеристику маневрових властивостей машинних агрегатів.
- Дайте класифікацію поворотів.
- Як розрахувати ширину поворотної смуги та ширину загінки?
- У чому полягає призначення поворотної смуги?
- Від чого залежить ширина поворотної смуги?
- За якими ознаками класифікують способи руху агрегатів?
- Які способи руху застосовують на сівбі, культивації, боронуванні, дискуванні, збиральних роботах, міжрядному обробітку просапних культур?
- Які є способи руху орних агрегатів?
- Що таке коефіцієнт робочих ходів, формула розрахування?
- Як розрахувати ширину загінки?
- Шляхи підвищення коефіцієнта робочих ходів.